
S’ispira alla larva di una stella marina – e si muove usando minuscoli peli per portare farmaci alle cellule – il microrobot realizzato da un team della Scuola Politecnica Federale (ETH) di Zurigo.
E’ guidato da onde sonore che muovono ciglia sintetiche dirigendo il fluido attorno ad esso, proprio come avviene con il suo equivalente naturale.
In futuro, questo nuovo microrobot potrebbe consentire di somministrare farmaci alle cellule malate con la massima precisione.
Indice degli argomenti
La salute in un battito di ciglia
Le ciglia sono brevi appendici simili a peli – presenti in vari sistemi biologici – che si sono evoluti per manipolare e raccogliere cibo nei liquidi a regimi in cui la viscosità domina l’inerzia. Ed è stato proprio il movimento di una larva, in particolare quella di stella marina, che ha ispirato i ricercatori dell’ETH di Zurigo e che li ha portati a sviluppare un microrobot per la somministrazione di farmaci.
Sono proprio i minuscoli peli di cui è dotato il microrobot che, attivati da ultrasuoni, guidano il fluido attorno ad esso imitando le disposizioni naturali delle bande ciliari sulla superficie della larva delle stelle marine. Ciglia che, tipicamente, sono da esse utilizzate per nuotare e nutrirsi.
Ispirandosi a questi sistemi naturali, le ciglia sintetiche sono state sviluppate e utilizzate nella microfluidica e nella microrobotica per ottenere funzionalità quali la propulsione, il pompaggio, la miscelazione di liquidi e la manipolazione delle particelle.
Robotica bioispirata: l’Italia c’è eccome
Il microrobot ideato dai ricercatori di Zurigo fa parte di una serie di dispositivi robotici di dimensioni microscopiche progettati per “nuotare” all’interno del corpo umano, muovendosi in maniera autonoma per eseguire procedure mediche non invasive (nel caso in questione, per esempio, per portare farmaci ad aree specifiche ed eseguire piccolissimi interventi chirurgici).
Il tutto, in sintonia con la robotica bioispirata e la soft robotics, ambiti della ricerca nei quali l’Italia è un’eccellenza. Si pensi, ad esempio, al progetto CELLOIDS (dell’Istituto di BioRobotica della Scuola Superiore Sant’Anna) con dispositivi robotici microscopici ispirati alle cellule o al progetto europeo I-Seed con soft robot miniaturizzati biodegradabili – ispirati ai semi delle piante – usati per il monitoraggio dei parametri ambientali.
In Italia, quest’ultimo progetto coinvolge la Scuola Superiore Sant’Anna e l’Istituto sull’inquinamento atmosferico del Cnr.
Com’è fatto e come funziona il microrobot
Nel suo stadio larvale, una stella marina ha un corpo lobato che misura solo pochi millimetri di diametro, mentre il microrobot è una sorta di rettangolo dieci volte più piccolo, solo un quarto di millimetro di diametro. I due sistemi condividono, però, una caratteristica importante: una serie di peli finissimi e opportunamente inclinati.
Il meccanismo di funzionamento del microrobot in un video della Scuola Politecnica Federale (ETH) di Zurigo
I ricercatori dell’ETH di Zurigo hanno applicato onde ultrasoniche da una fonte esterna per far oscillare le ciglia.
Le versioni sintetiche delle ciglia battono avanti e indietro più di diecimila volte al secondo, circa mille volte più velocemente di quelle di una larva di stella marina. E, come nella larva, queste ciglia battenti possono essere utilizzate per generare un vortice con un effetto di aspirazione nella parte anteriore e un vortice con un effetto di spinta nella parte posteriore: l’effetto combinato “spinge” il robot in avanti.
I farmaci arrivano alle cellule con la massima precisione
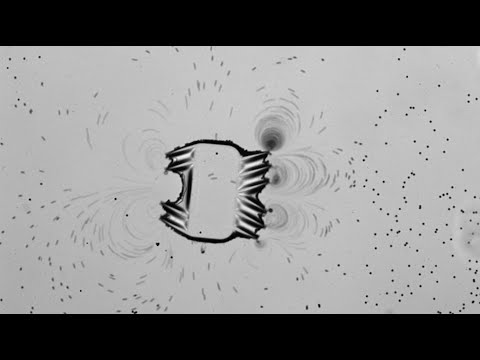
Nel loro laboratorio, i ricercatori hanno dimostrato che i microrobot possono nuotare in linea retta attraverso liquidi come l’acqua. L’aggiunta di minuscole perline di plastica all’acqua ha reso possibile visualizzare i vortici creati dal microrobot. Il risultato è sorprendente: sia le larve di stelle marine sia i microrobot generano schemi di flusso praticamente identici.

Successivamente, gli studiosi hanno disposto le bande ciliari in modo che un vortice di aspirazione fosse posizionato accanto a un vortice di spinta, imitando la tecnica di alimentazione utilizzata dalle larve di stelle marine. Questa disposizione ha permesso ai robot di raccogliere le particelle e inviarle in una direzione predeterminata.
Le ciglia e le bande ciliari attivate dagli ultrasuoni sono particolarmente attraenti per l’ambito medico in quanto gli ultrasuoni sono sicuri per la maggior parte dei sistemi biologici, non invasivi e penetrano in profondità nel corpo di un modello animale.
In futuro, tali micronuotatori potrebbero fornire farmaci alle cellule malate con una precisione elevatissima, permettendo – ad esempio – il trattamento di alcuni tipi di tumori.
Prospettive future e sfide da vincere
“Questa terapia richiede solo un dispositivo a ultrasuoni. Ciò la rende particolarmente economica e, quindi, utilizzabile anche nei paesi in via di sviluppo”, ha affermato Daniel Ahmed, Professore di robotica acustica per le scienze della vita e l’healthcare presso l’ETH.
Ahmed ritiene che un primo campo di applicazione potrebbe essere il trattamento dei tumori gastrici. L’assorbimento dei farmaci convenzionali per diffusione è inefficiente, ma avere microrobot che trasportano un farmaco specificamente nel sito di un tumore allo stomaco, rilasciandolo esattamente dove serve, potrebbe rendere più efficiente l’assorbimento del farmaco nelle cellule tumorali e ridurre eventuali effetti collaterali.
Ma, prima che questa idea possa concretizzarsi, resta una grande sfida da superare: l’imaging. Guidare le minuscole macchine nel posto giusto, infatti, richiede che venga generata un’immagine nitida in tempo reale. I ricercatori hanno in programma di rendere più visibili i microrobot incorporando in essi agenti di contrasto come quelli già utilizzati nell’imaging medico con gli ultrasuoni.
Se ci riusciranno, non saranno visibili solo i microrobot, ma anche i risultati che la robotica bioispirata potrà offrire per il futuro della nostra salute.





